大數據服務 賦能決策,洞見未來
在信息化浪潮席卷全球的今天,數據已不再是簡單的記錄符號,而是驅動社會進步與商業創新的核心生產要素。從海量、多源、高速增長的“數據”中提取價值,依賴于專業的“數據分析”。而將兩者結合,并提供系統化、規模化解決方案的,正是蓬勃發展的“大數據服務”。它已成為政府治理、企業運營乃至科學研究不可或缺的基石。
一、數據的基石:從資源到資產
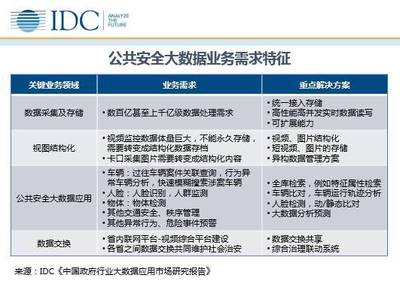
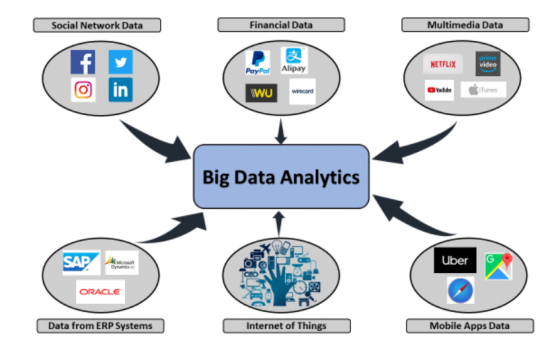
數據是分析的起點。大數據時代的數據特征通常被概括為“4V”:Volume(海量)、Velocity(高速)、Variety(多樣)、Value(價值)。這些數據來自物聯網設備、社交網絡、交易系統、傳感器等方方面面,構成了數字世界的“原油”。原始數據本身價值密度低,必須經過采集、清洗、存儲和管理,才能轉化為可用的數據資產。大數據服務的基礎層正是提供穩定、安全、可擴展的數據存儲與計算平臺,例如云存儲、分布式數據庫和數據湖,為后續的價值挖掘奠定堅實基礎。
二、分析的核心:從信息到洞見
數據分析是將數據資產轉化為知識和智慧的關鍵過程。它涉及描述性分析(發生了什么)、診斷性分析(為何發生)、預測性分析(將會發生什么)以及規范性分析(應該做什么)。借助機器學習、人工智能、統計建模等先進技術,數據分析能夠揭示隱藏的模式、趨勢和相關性。例如,在商業領域,通過分析用戶行為數據,可以精準描繪用戶畫像,實現個性化推薦;在公共安全領域,通過分析城市交通流量數據,可以優化信號燈配時,緩解擁堵。大數據服務提供從分析工具、算法模型到可視化儀表盤的全套分析能力,讓數據“說話”,將復雜信息轉化為直觀、可操作的洞見。
三、服務的價值:從技術到賦能
大數據服務的終極目標不是提供孤立的技術或工具,而是為客戶創造業務價值,實現全面賦能。它通常以平臺化、服務化的形式呈現,包括:
- 基礎設施即服務(IaaS):提供彈性的計算、存儲和網絡資源。
- 平臺即服務(PaaS):提供包含開發工具、數據庫和管理服務的大數據平臺,降低技術門檻。
- 軟件即服務(SaaS):提供開箱即用的數據分析應用,如CRM分析、風險監控系統等。
- 數據即服務(DaaS):提供經過處理的、可直接用于分析的高質量數據集合或數據API。
- 分析與咨詢服:提供從戰略規劃、數據治理到具體分析場景落地的專業咨詢服務。
通過整合數據、技術與行業知識,大數據服務幫助客戶優化運營流程、驅動產品創新、提升用戶體驗、發現新的市場機會,并最終實現數據驅動的智能決策。
四、挑戰與未來展望
盡管前景廣闊,大數據服務的發展也面臨數據安全與隱私保護、數據質量治理、技術人才短缺、跨領域融合等挑戰。隨著邊緣計算、人工智能與物聯網的深度融合,大數據服務將更加實時化、智能化和普惠化。它不再局限于大型企業,也將更多地向中小企業和垂直行業滲透。隱私計算、聯邦學習等技術的發展,有望在保護數據隱私的前提下,進一步釋放數據價值。
總而言之,大數據服務是連接數據世界與業務價值的橋梁。它將冰冷的數據轉化為溫暖的洞見,將復雜的技術轉化為簡便的服務,正以前所未有的力量重塑各行各業。擁抱大數據服務,就是擁抱一個更加智能、精準和高效的未來。
如若轉載,請注明出處:http://www.tolean.com.cn/product/46.html
更新時間:2026-06-18 11:27:05